2025
ChemAI: Empowering Robots to Automate Chemical Experiments with Large Language Models
Yefan Lin*, Ziyuan Wang*, Lujia Zhang, Chengwei Zhang, Xiaojun Hei# (* equal contribution, # corresponding author)
2025 International Conference on Computing and Artificial Intelligence (ICCAI) 2025
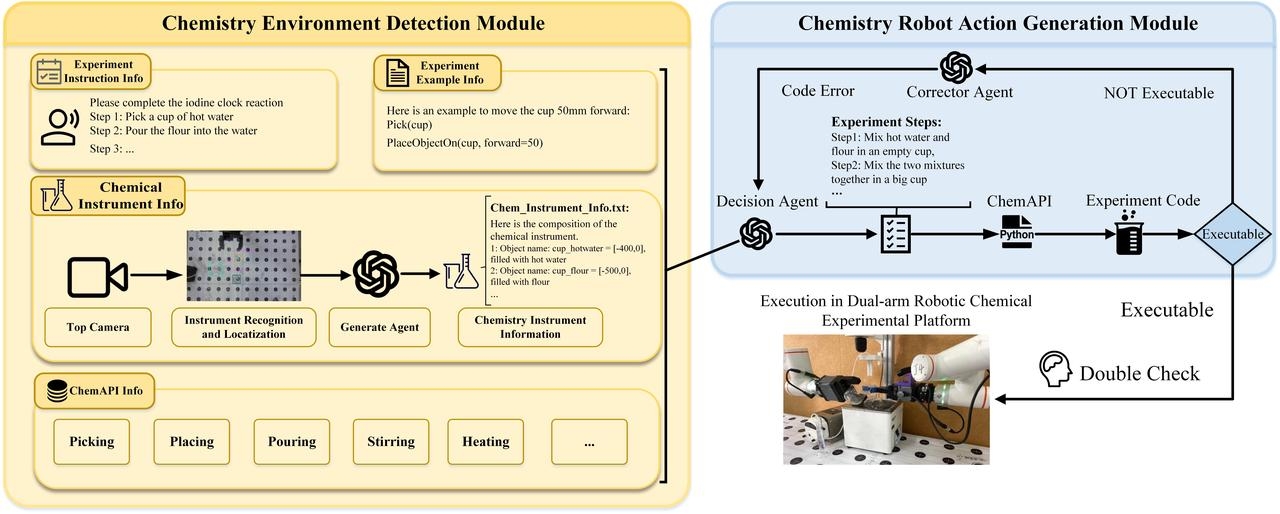
In this paper, we designed ChemAI, an autonomous robotic system for chemistry experiment automation that receives natural language from chemists as input, which can perceive the environment and execute long-term tasks including multi-step chemistry experiments.
ChemAI: Empowering Robots to Automate Chemical Experiments with Large Language Models
Yefan Lin*, Ziyuan Wang*, Lujia Zhang, Chengwei Zhang, Xiaojun Hei# (* equal contribution, # corresponding author)
2025 International Conference on Computing and Artificial Intelligence (ICCAI) 2025
In this paper, we designed ChemAI, an autonomous robotic system for chemistry experiment automation that receives natural language from chemists as input, which can perceive the environment and execute long-term tasks including multi-step chemistry experiments.
2024
Deep Reinforcement Learning for Sim-to-Real Transfer in a Humanoid Robot Barista
Ziyuan Wang, Yefan Lin, Leyu Zhao, Jiahang Zhang, Xiaojun Hei# (# corresponding author)
IEEE International Conference on Robotics and Biomimetics (ROBIO) 2024
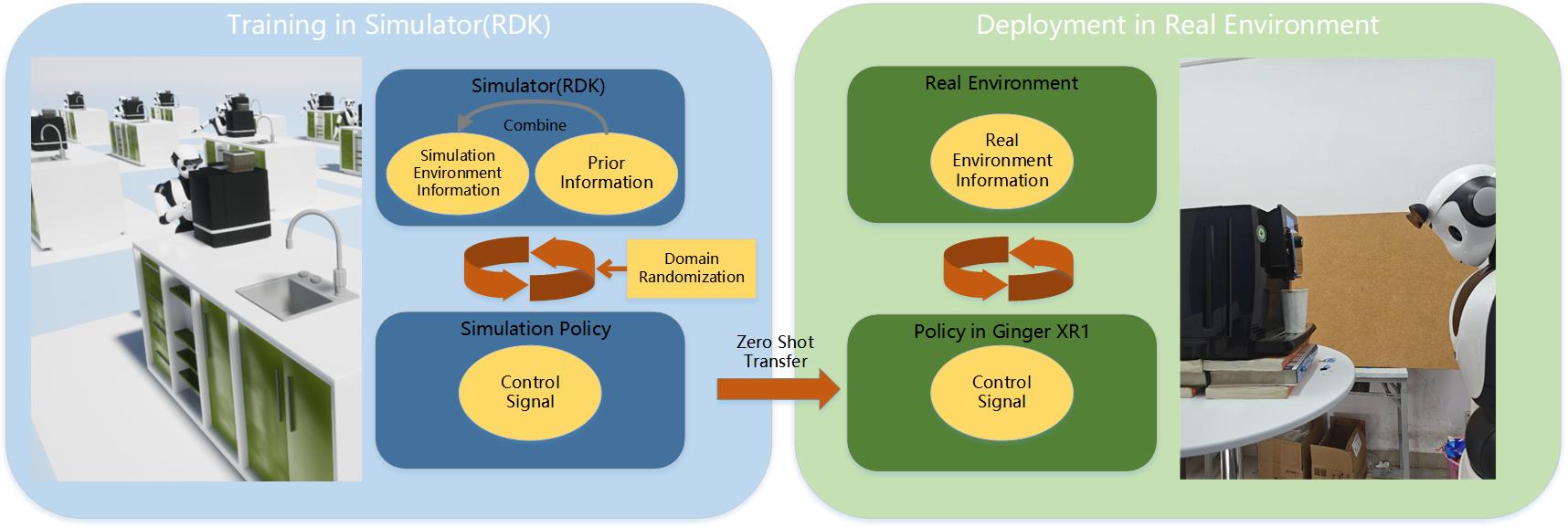
In this paper, we study the coffee-making application as an example. We proposed a reinforcement learning robot manipulation method with visual perception for filling-up the sim-to-real gap. We constructed a high-fidelity coffee making digital twin simulation environment.
Deep Reinforcement Learning for Sim-to-Real Transfer in a Humanoid Robot Barista
Ziyuan Wang, Yefan Lin, Leyu Zhao, Jiahang Zhang, Xiaojun Hei# (# corresponding author)
IEEE International Conference on Robotics and Biomimetics (ROBIO) 2024
In this paper, we study the coffee-making application as an example. We proposed a reinforcement learning robot manipulation method with visual perception for filling-up the sim-to-real gap. We constructed a high-fidelity coffee making digital twin simulation environment.
Self-Perceptive Framework: A Manipulation Framework with Visual Compensation for Zero Position Error
Ziyuan Wang, Yefan Lin, Jiahang Zhang, Changjiang Han, Xiaojun Hei# (# corresponding author)
Autonomous Robot Under review.
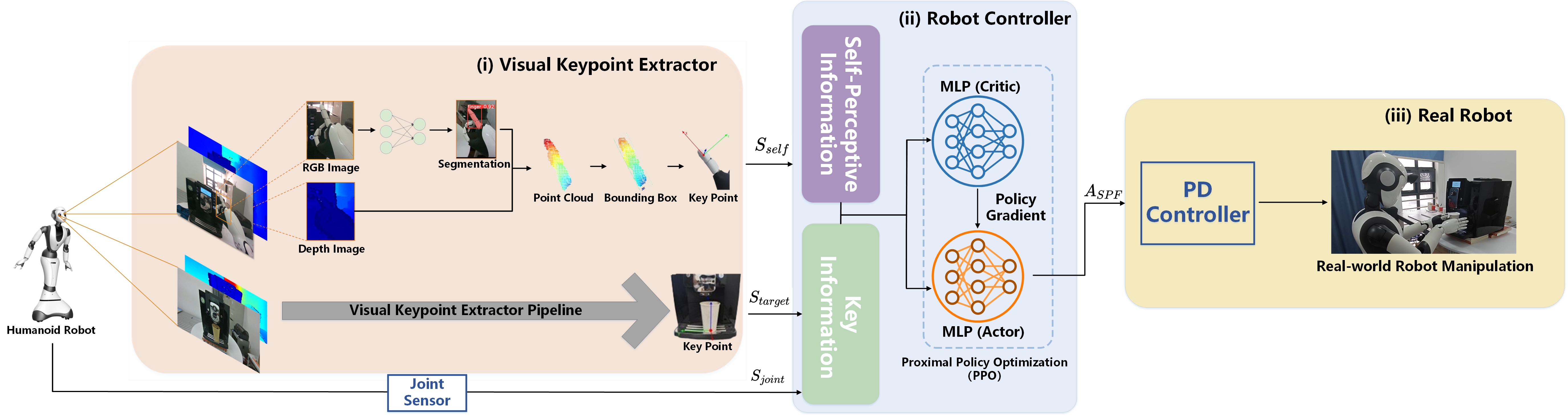
In this paper, to improve the success rate of robot manipulation tasks with zero position problem and reduce the frequency of recalibration, we proposed a robot manipulation framework, the Self-Perceptive Framework(SPF), which uses reinforcement learning and incorporates self-perceptive information.
Self-Perceptive Framework: A Manipulation Framework with Visual Compensation for Zero Position Error
Ziyuan Wang, Yefan Lin, Jiahang Zhang, Changjiang Han, Xiaojun Hei# (# corresponding author)
Autonomous Robot Under review.
In this paper, to improve the success rate of robot manipulation tasks with zero position problem and reduce the frequency of recalibration, we proposed a robot manipulation framework, the Self-Perceptive Framework(SPF), which uses reinforcement learning and incorporates self-perceptive information.
2022
Design a Cloud-enabled Humanoid Robot Application System to Assess the ABA Learning for Autistic Children
Ziyuan Wang, Yiwei Chen, Xiaojun Hei# (# corresponding author)
International Conference on Intelligent Education and Intelligent Research (IEIR) 2022
In this paper we apply the cloud-based robotics and the practical needs of the Applied- Behaviour-Analysis (ABA) learning for autistic children, and design an a cloud-enabled humanoid robot application system, in order to reduce the teacher’s workload.
Design a Cloud-enabled Humanoid Robot Application System to Assess the ABA Learning for Autistic Children
Ziyuan Wang, Yiwei Chen, Xiaojun Hei# (# corresponding author)
International Conference on Intelligent Education and Intelligent Research (IEIR) 2022
In this paper we apply the cloud-based robotics and the practical needs of the Applied- Behaviour-Analysis (ABA) learning for autistic children, and design an a cloud-enabled humanoid robot application system, in order to reduce the teacher’s workload.